● 兼顧理解與奠基,快速進入STM32的世界
● Arduino大解密,直搗開發板核心
● 結合異質MCU,直搗STM32核心源碼
● 詳細的解說讓你更清楚地了解每個細節
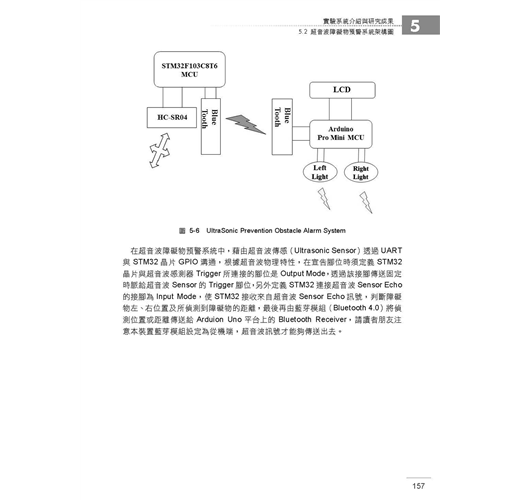
近年來物聯網的浪潮席捲全球,自造者藉由巧妙的應用微控制器創作許多令人讚嘆的作品,因此本書試圖從生活中發想,應用基於ARM Cortex-M3架構下的STM32F103系列微控制器以及搭載Atmel AVR晶片的Arduino微控制器(MCU),開發一個泛用型嵌入式系統平台,藉由搭配姿態感測儀(Gyroscope &Accelerometer),透過Wifi、ZeeBee、RFID或Bluetooth(本書選用藍芽傳輸)等多元化的無線傳輸方式來控制機器手臂,另一個實驗同樣應用上述STM32與Arduino組合而成的微控制平台,結合超音波感測器,於偵測到障礙物時透過藍芽模組(Bluetooth Module)即時傳輸預警信號提示駕駛。
目錄
第一章 導論
1.1 緒論
1.2 指令集架構
1.3 淺談儲存記憶體
1.4 UART與USART通訊格式簡介
1.5 SPI與I²C傳輸簡介
1.6 微控制器燒錄方式簡介
1.7 本書源起
1.8 本書實驗目標
1.9 本書架構
第二章 Arduino微控制器
2.1 Arduino Pro Mini 硬體規格
2.2 Arduino Uno 硬體規格
2.3 Arduino 程式編輯環境
2.4 Arduino 程式燒錄
2.5 藍芽傳感器簡介
2.6 藍芽模組AT Command 指令設定
2.7 LCD液晶螢幕簡介
2.8 I²C通訊架構簡介
2.9 I²C LCD模組字幕控制
第三章 STM32嵌入式開發板平台硬體介紹
3.1 STM32開發板簡介
3.2 STM32控制LCD模組程式
3.3 STM32超音波Sensor控制步進馬達
3.4 陀螺儀與加速度計6軸模組
3.5 STM32陀螺儀與加速度規藍芽傳輸程式
第四章 機器手臂簡介
4.1 機器手臂結構
4.2 機械運動學
第五章 實驗系統介紹與研究成果
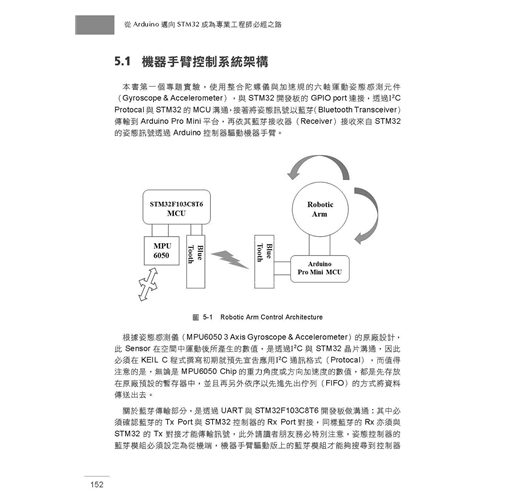
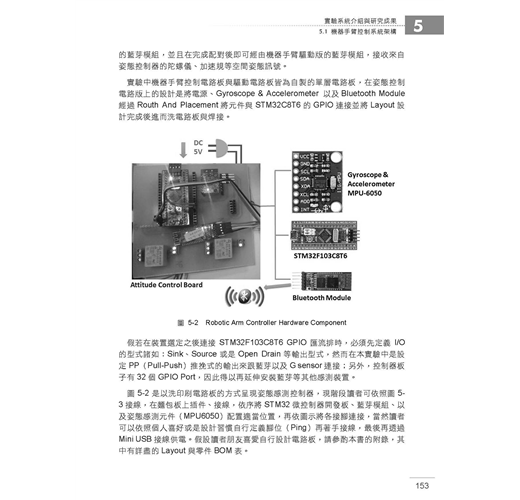
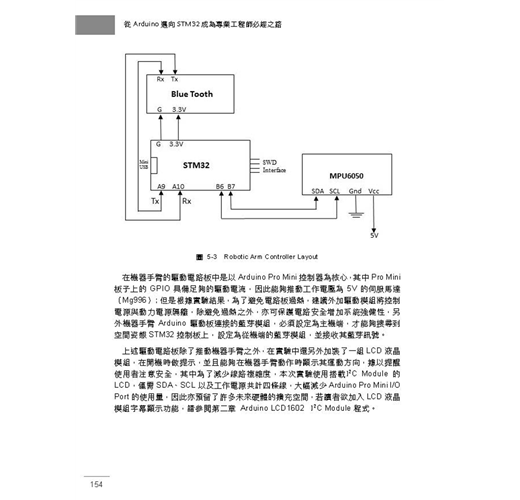
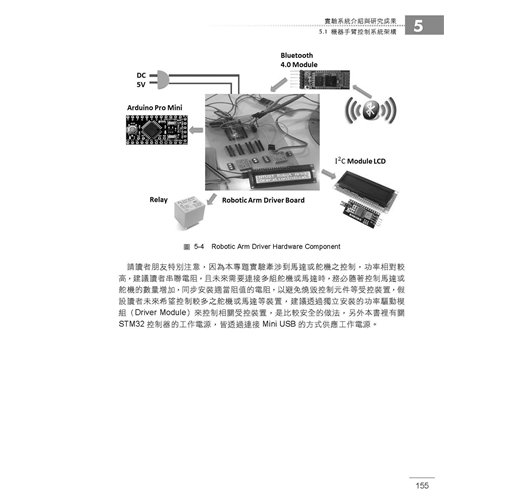
5.1 機器手臂控制系統架構
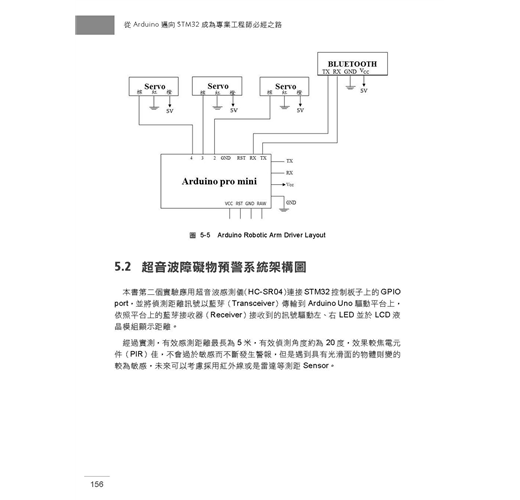
5.2 超音波障礙物預警系統架構圖
5.3 STM32F103硬體宣告語法
5.4 Arduino程式語法介紹
5.5 STM32陀螺儀、加速規及藍芽傳輸程式
5.6 機器手臂Arduino驅動程式
5.7 機器手臂實驗成果
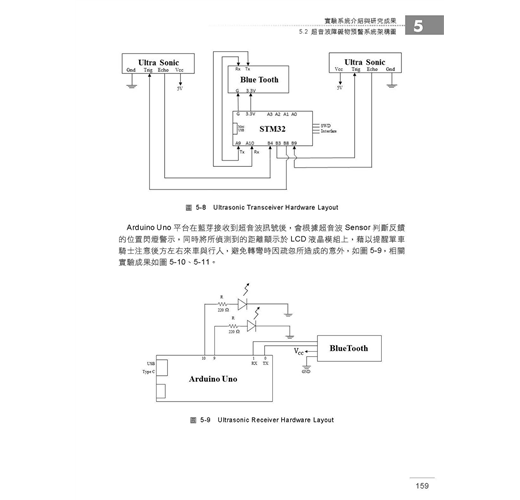
5.8 STM32超音波障礙物預警系統程式
5.9 Arduino超音波障礙物預警裝置程式
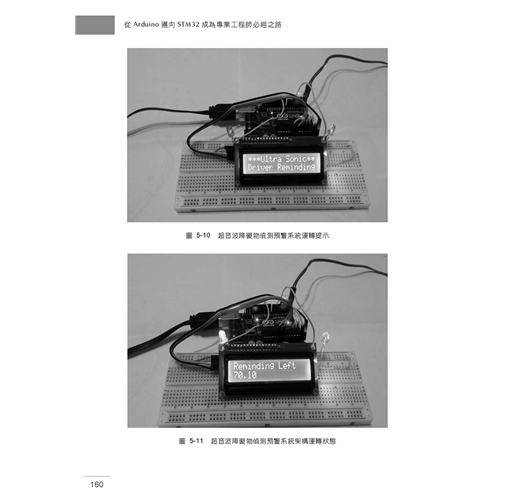
5.10 Arduino超音波障礙物預警裝置實作
第六章 後記
6.1 拾零
6.2 未來衍生應用
附錄
附件1 機器手臂控制及驅動板Layout
附件2 超音波障礙物偵裝置Layout
參考文獻
第一章 導論
1.1 緒論
1.2 指令集架構
1.3 淺談儲存記憶體
1.4 UART與USART通訊格式簡介
1.5 SPI與I²C傳輸簡介
1.6 微控制器燒錄方式簡介
1.7 本書源起
1.8 本書實驗目標
1.9 本書架構
第二章 Arduino微控制器
2.1 Arduino Pro Mini 硬體規格
2.2 Arduino Uno 硬體規格
2.3 Arduino 程式編輯環境
2.4 Arduino 程式燒錄
2.5 藍芽傳感器簡介
2.6 藍芽模組AT Command 指令設定
2.7 LCD液晶螢幕簡介
2.8 I²C通訊架構簡介
2.9 I²C LCD模組字幕控制
第三章 STM32嵌入式開發板平台硬體介紹
3.1 STM32開發板簡介
3.2 ST...
購物須知
退換貨說明:
會員均享有10天的商品猶豫期(含例假日)。若您欲辦理退換貨,請於取得該商品10日內寄回。
辦理退換貨時,請保持商品全新狀態與完整包裝(商品本身、贈品、贈票、附件、內外包裝、保證書、隨貨文件等)一併寄回。若退回商品無法回復原狀者,可能影響退換貨權利之行使或須負擔部分費用。
訂購本商品前請務必詳閱退換貨原則。