機巧法改善(Karakuri Kaizen),低成本實踐簡便自動化!
持續改善,是企業追求永續經營的基石,源自於日本,從江戶時代流行的機械人偶獲得啟發,以簡易的機械構造,進行現場改善,以減少浪費、提升生產效率的改善手法,稱之為「機巧法」。
本書以建構「機巧裝置」基本構成方式開始談起,以淺顯易懂的圖片來進行詳盡的解說,方便從事改善活動的人員,方便查閱符合機巧目的的各種技巧,並進而能將之活用於工作現場中。
★書內收錄之不同目的別「機巧裝置」
均等變換機構/間歇驅動機構/倍速移動機構
內含行星小齒輪的機構/均衡器
利用單一動作建構出複數時段的機構/轉換運動方向機構
傳達運動機構/水平移動機構/連桿機構/增力機構/導引機構
能建構良好的運動特性的機構/操控搬送的機構/驅動器
將馬達旋轉轉換成往返運動的機構/防止反轉機構
本書特色
★第一本完整詳解省錢、省力又節能的「機巧裝置」專業圖典
★看圖就懂!92種用途別、構造別「機巧裝置」設計大圖解
作者簡介:
熊谷英樹
1981年 慶應義塾大學工學部電力工程科畢業
1983年 慶應義塾大學大學院電力工程結業。進入住友商事。
1988年 進入新興技術研究所。
現任新興技術研究所高級常務董事、日本教育企劃公司代表董事。神奈川大學兼任講師、山梨縣產業技術短期大學兼任講師、自動化推進協會理事、高齡〮障礙〮求職者雇用支援機構兼任講師。
主要著作:
《從零開始的第一次程序控制就上手》日刊工業新聞社,2001年出版
《程序控制程式正典──附機構圖解》日刊工業新聞社,2003年出版
《從零開始的第一次程序控制程式就上手》日刊工業新聞社,2006年出版
《運用MATLAB與實驗了解自動控制》日刊工業新聞社,2008年出版
《新實踐自動化機構圖解集──製造的要素與機械系統》日刊工業新聞社,2010年出版
《自動機設計ABC實務》日刊工業新聞社,2010年出版
《輕鬆認識程序控制》日刊工業新聞社,2012年出版
《熊谷英樹的程序控制道場》日刊工業新聞社,2014年出版
《程序控制程式正典 Part 2──附機構圖解》日刊工業新聞社,2014年出版
作者序
出版序
追求至善無止境/財團法人中衛發展中心董事長 謝明達
古德云:「勿以惡小而為之,勿以善小而不為。」一語道破品質管理的核心,哪怕只是現場的小改善都要去做,哪怕生產過程中有任何小錯誤都不能放過。雖然許多企業已開始應用IoT、Big Data 甚至AI 等科技來提升製造、服務的效率與品質,然改善活動所產生的智慧仍是這些科技應用的重要基礎,尤其是從實施改善活動進而創造出全體持續改善的組織文化,更是企業永續經營的重要基石。
中衛中心協助政府推動品質運動、舉辦團結圈活動競賽,輔導企業運用管理工具提升品質效率已超過30 餘年,台灣產業在這數十年間也經歷了自動化、數位化的鉅變,但唯一不變的是企業追求品質的堅持絲毫未減。即便規模大如傳統產業的中國石油、統一企業,資訊科技業的台積電、聯電等,以及醫療服務業的榮民總醫院、長庚醫院、國泰醫院等,仍積極推動各種改善活動,且反映在經營實績上成效卓著。
近十年來,隨著科技的發展、顧客需求的轉變,製造生產面臨少量多樣的挑戰,如何在現有設備以及資源的限制條件下來因應,成為企業重大的生存課題。雖然,智慧製造可以有效滿足客戶的多變需求,但對於規模不大、資源不夠豐沛的中小企業來說,無疑是一場考驗現場製造實力的硬仗。藉由鼓勵基層員工發揮巧思,運用無動力裝置改善機械設備,以解決現場製造問題的機巧法改善(karakuri Kaizen),就是一種既能提升生產效率,還能強化員工素質的品質管理手法。對於無法大規模投資設備的中小企業來說,這種成本低、省能源就能實施簡易自動化的改善活動更應該多多益善。
我們從幾次帶領台灣企業參訪日本機巧法改善年度盛會─機巧改善設計展(からくり改善くふう展),發現不少國際級企業參與其中,諸如日產、豐田、三得利啤酒等,不難看出企業無分大小,追求至善的腳步從未停歇。因此,中衛中心也特別於2018 年底盛大舉辦第一屆機巧法全國交流活動,現場將完整展出許多國內標竿企業的機巧法改善實際案例,期望讓更多人不管是透過本書的出版或是親臨現場參與活動,能零距離體驗與汲取標竿企業的改善創意與經驗。追求至善之路,中衛中心與您並肩同行!
前言
1. 本書特色
本書提供建構「機巧裝置」經常使用的機構及其構成方法,以淺顯易懂的圖片進行詳盡的解說。為了能讓讀者在投入設計時,方便查閱符合機巧法用途的各種技巧,遂將每個技巧以「應用」的型態加以彙整。
全書的15個章節,是採字典的編輯方式以利查閱,方便大家在設計機巧機構及機械裝置時,能充分活用各種機構的重點提示。
機巧裝置,並不是因其獨特用法而自成一格的特別機構。不管是機巧單元所使用的機構,還是自動化裝置所使用的機構,基本上都是相同的機構,所以本質不相違背。就算是複雜的機巧單元和機械裝置所使用的機構,一旦加以分解並深入了解的話,就能對其基本的機構要素來進行分類。
書中所列舉出這類機構的基本要素,相信能提高大家的學習效率。內容編排方式雖然是為了方便閱讀,而採用圖典輯的型式,若能從第1 章開始依序詳閱運用方式,那麼對機巧設計所使用的機構要素,更能逐一地理解。特別是首次接觸機巧單元裝置的讀者,誠心推薦您從第1章開始依序閱讀,如此一來,就能有系統性地學習到設計機巧裝置所應具備的必要知識。
2. 機巧的技術
書中所介紹的機巧技術,都是使用讓人或用手來推壓,或用腳來踩踏這類單純的動力,還有使用馬達和氣壓缸這類單純的動力源,這些都是能夠提升現場作業者使用作業裝置時更有效率或省力的一門技術。
可以不使用動力源嗎?雖然還是有使用動力源,卻僅此一項而已,且幾乎完全沒用到操控系統,機巧法基本上是一種完全只依賴機構的作動來驅動裝置的應用技術。
本書對於一般的設計者,是以讓他在發想與創造機巧機構時,可以不受限地自由運用技巧、技術,順利建構出機巧裝置為目標。
至於對那些熟練的設計者,應該可以激發出更多,不必靠著突發奇想的創造力,卻可以想出有趣的機構。此外,機構的構造可變性相當多元,說不定熟練的技術者每天都能想出前所未見的機巧裝置。
然而機構的要素並沒有我們所想像的這麼多。只要能深入理解數十種典型的基本機構及其特性,就可以自由變化機巧裝置了。
就算你不是個技術熟練的人,只要運用本書特別嚴選的幾個機巧設計中特具功效的典型機構,就能把機構的要素自由自在地組合成機巧裝置。要提醒的是,若你想要自由自在地設計機巧單元,需要深入學習機構各個基本要素的種類,及其理論基礎、機能、運動特性與聯結方法。
3. 機巧裝置的設計
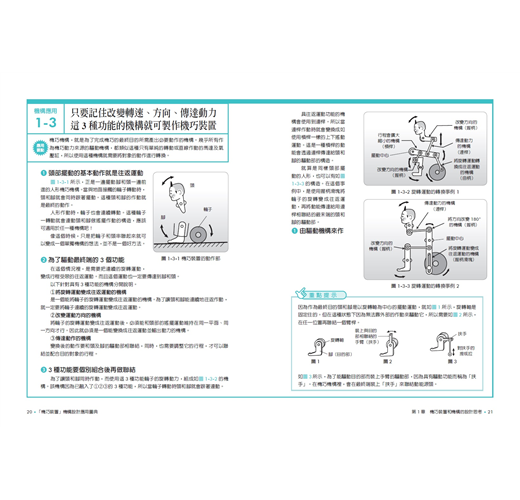
機巧裝置設計最重要且有相當難度的是,去建構出要讓機巧裝置作動時所需的必要動作。若要設計出只靠單個馬達讓腳一面作動,手腕也一起跟著作動的話,就一定要去建構出只由單個馬達旋轉運動的機巧裝置。
至於那些依賴操控系統,將手腕和腳直接和個別的馬達相聯結的驅動方式就不算是機巧裝置了。如果真的要這麼做的話,使用複數的馬達就可以完成了,因為只需透過控制馬達就能讓機巧裝置作動了。而一旦控制不良導致馬達之間的速度出現差異,手腕和腳擺動的時間點也就會不一樣了。
從低速轉動到高速轉動為止,要讓所有的機構可以同期作動,就需要利用一個馬達來建構出複數機構的作動。
為滿足這樣的需求,就應設計出讓馬達從單純的旋轉運動,來產出不同時間點的複數動力輸出的機構。以及,也要有讓它的運動方向可以轉換,手腕和腳可以相聯結的機巧設計,就是要像這樣──能建構出運動特性、可以轉換運動方向、透過配合行程的聯結,就能夠完成滿足機巧裝置最末端目的進行作動的機構構造。
為了能夠完成這樣的設計,書中會把單純驅動器的機械動力輸出加以轉換,目的是為了讓機巧裝置的最末端可以作動,至於這些所需的技能,就以目的別來分類成「運用」的型態做說明。
書中所用的說明照片,都用括弧寫上MM 開頭的型號,它所呈現的全都是新興技術研究所製作的MM3000 系列的教材單元。
即使是在設計的空檔閱讀本書,定能學習到機構的構造,期望對各位設計能力的提升有所助益。
熊谷 英樹
2017 年6 月
出版序
追求至善無止境/財團法人中衛發展中心董事長 謝明達
古德云:「勿以惡小而為之,勿以善小而不為。」一語道破品質管理的核心,哪怕只是現場的小改善都要去做,哪怕生產過程中有任何小錯誤都不能放過。雖然許多企業已開始應用IoT、Big Data 甚至AI 等科技來提升製造、服務的效率與品質,然改善活動所產生的智慧仍是這些科技應用的重要基礎,尤其是從實施改善活動進而創造出全體持續改善的組織文化,更是企業永續經營的重要基石。
中衛中心協助政府推動品質運動、舉辦團結圈活動競賽,輔導企業運用管理工具提升品質效率已超過...
目錄
出版序
前言
目的別「機巧裝置」機構一覽
第1章 機巧裝置和機構的設計思考
機構應用1-1 輸出2 倍力量,變換的速度就會減半
機構應用1-2 使用槓桿的重點就在支點、施力點、抗力點間的距離
機構應用1-3 只要記住改變轉速、方向、傳達動力這3 種功能的機構
就可製作機巧裝置
機構應用1-4 將驅動機構的動作改成手動就能建構出「簡易機巧裝置」
機構應用1-5 組合二種驅動機構以建構出兼具二者特性的「機巧裝置」
機構應用1-6 反轉運動的方向就能建構出好操作的「機巧裝置」
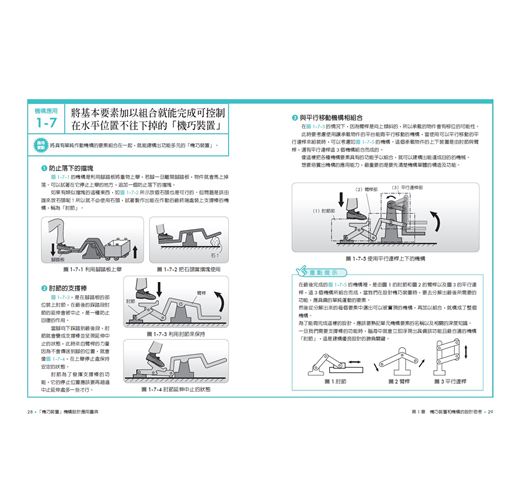
機構應用1-7 將基本要素加以組合,就能完成可控制在水平位置不往下掉的「機巧裝置」
第2章 「均等變換」的機構
機構應用2-1 使用齒輪以便更有效率地改變運動方向
機構應用2-2 使用齒條及小齒輪將環形旋轉均等運動變換成直線運動
機構應用2-3 成雙的齒條及小齒輪就能建構出平衡夾具
機構應用2-4 使用蝸輪組來阻止反轉
機構應用2-5 由馬達驅動傳動螺桿以便停在複數位置
機構應用2-6 使用正時皮帶就能建構出由馬達驅動的撿取與放置單元機構
機構應用2-7 使用鏈條來傳送重物
機構應用2-8 運用滑輪,只要一半的行程就可以創造出2 倍的上舉力量
第3章 運用「行星小齒輪」的機構
機構應用3-1 思考旋轉軸與外圓周的移動方式,就能理解行星小齒輪的作動
機構應用3-2 使用齒條及小齒輪型倍速機構讓氣壓缸的行程變成2 倍
機構應用3-3 使用帶有滾輪的鏈條輸送帶可讓輸送帶的搬運速度變成2 倍
機構應用3-4 使用擺線移動機構,讓機構邊旋轉邊運送物件到遠處
機構應用3-5 使用行星齒輪就可做到3 段變速
機構應用3-6 使用均衡器讓形狀怪異的工件,能持續被往前推送
機構應用3-7 使用差速齒輪就能建構扭力均衡器
機構應用3-8 使用行星小齒輪讓單一動作牽引出不同時段的2 個作動
第4章 運用「槓桿運動轉換與連桿聯結」的機構
機構運用4-1 使用臂桿可以簡單地轉換運動方向
機構運用4-2 用臂桿取代直動導塊就能完成的簡單設計
機構運用4-3 將線性導塊換成臂桿,就可以自由配置驅動器
機構運用4-4 被導引的手臂可用連桿棒來聯結
機構運用4-5 使用連桿的沖壓移動機構
機構運用4-6 使用伸縮手臂來聯結相同的臂桿
機構運用4-7 使用滑槽塊讓臂桿和直動機構直接聯結
機構運用4-8 使用滑槽塊的沖壓移動機構
機構運用4-9 使用滑臂桿和滑槽塊,讓短行程的氣壓缸產生大範圍的往返運動
第5章 運用「肘節切換增力機構」
機構運用5-1 若需要很大力道的話,就使用肘節讓它伸展到極限
機構運用5-2 使用2 根連桿臂來建構出肘節
機構運用5-3 使用肘節來夾取工件
機構運用5-4 臂桿的驅動部換成肘節,就可以在末端增力
機構運用5-5 使用雙肘節可以讓行程的兩端減速停止
機構運用5-6 使用滑槽塊、肘節、選擇桿的沖壓移動機構
機構運用5-7 只要組合基本要素也能建構出如同「自動端子沖壓單元機構」
機構運用5-8 使用伸臂連桿就可以從氣壓缸獲得很大的旋轉輸出動力
第6章 運用「平行連桿」的機構
機構運用6-1 使用平行連桿讓工件做水平的上下移動
機構運用6-2 平行連桿是由耳環式氣壓缸來驅動
機構運用6-3 使用平行連桿的撿取與放置單元機構讓旋轉軸可以同期作動
機構運用6-4 利用平行連桿來建構沖壓移動機構
機構運用6-5 使用拉入型沖壓移動機構讓沖頭可以大範圍移動
機構運用6-6 使用台形平行連桿來建構將重物上舉的升降台
機構運用6-7 使用皮帶型平行連桿來建構小型平行連桿
機構運用6-8 組合平行連桿與肘節,再以1 個氣壓缸來驅動,就可以建構出
撿取與移動單元機構
第7章 運用「臂力滑動」的機構
機構應用7-1 要讓直進與旋轉這二者作動,就要透過滑槽塊的旋轉軸來引導
機構應用7-2 步行機器人的腳是由滑槽型曲柄滑塊來驅動
機構應用7-3 以曲柄來驅動臂力滑動塊,就變成了曲柄滑槽塊
機構應用7-4 藉由臂力滑動塊的旋轉運動來驅動撿取與移動單元機構
機構應用7-5 當臂力滑動塊的旋轉中心偏移,移動節距就會改變
第8章 運用「物件傳送」的機構
機構應用8-1 使用止塊來促成行程末端產生動作
機構應用8-2 使用觸發擋板讓下一個工件稍做等待
機構應用8-3 使用擒縱器讓工件一個一個分離
機構應用8-4 使用起動桿就能設定工件送出的時間點
第9章 運用「驅動往返作動」的機構
機構應用9-1 提供機巧裝置動力的驅動器,其輸出動力有旋轉、擺動、直線運動
機構應用9-2 應用線性導塊讓氣壓缸輸出動力來驅動臂桿
機構應用9-3 旋轉機構是利用耳環式氣壓缸來驅動
構應應用9-4 使用旋轉軸承讓馬達來驅動機構
機構應用9-5 挖土機的驅動器是使用耳環式氣壓缸
第10章 運用「機械夾頭」的機構
機構應用10-1 使用交替機構讓機械夾頭的開閉狀態不會出現失誤
機構應用10-2 為了讓緊閉的力道維持不變就要使用肘節
機構應用10-3 為了增強把持力可利用肘節來增強夾頭的力道
機構應用10-4 利用曲柄的驅動讓夾頭的開閉能平穩地作動
機構應用10-5 平衡夾頭就是要使用平行連桿
第11章 運用「連續旋轉作動轉換」的機構
機構應用11-1 使用連桿棒來聯結旋轉運動
機構應用11-2 聯結連桿臂的旋轉和直進運動,就能建構出往返直進運動
機構應用11-3 使用曲柄以高速驅動平行連桿型撿取與放置單元機構
機構應用11-4 雙側的曲柄臂可以用來驅動重大負荷的作業
機構應用11-5 應用雙側支撐的曲柄臂,輸入單個旋轉動力,牽引出複數的曲柄動力輸出
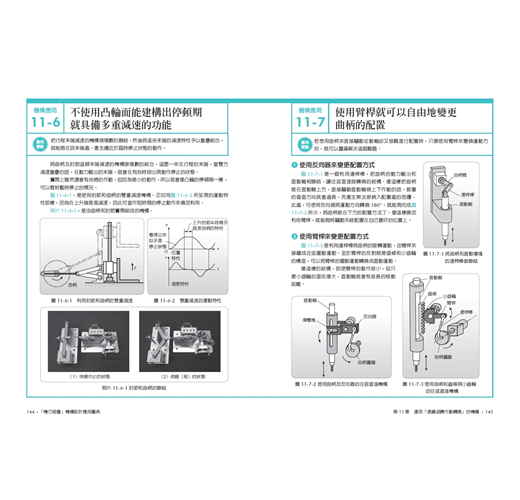
機構應用11-6 不使用凸輪而能建構出停頓期,就具備多重減速的功能
機構應用11-7 使用臂桿就可以自由地變更曲柄的配置
機構應用11-8 使用臂桿滑槽塊來建構快速返回的往返運動
機構應用11-9 使用凸輪來建構理想的往返運動特性
第12章 運用「區間制動塊」的機構
機構應用12-1 使用區間制動塊來變更氣動氣壓缸的行程
機構應用12-2 使用區間制動塊,可讓連續往返運動的兩端暫時地被停止
機構應用12-3 使用帶彈簧的區間制動塊來建構出,在連續往返運動中只發生在單側的停止位置
機構應用12-4 將彈簧聯動和區間制動塊組合在一起,就能讓單項的動力輸入得到3 個時間點的動力輸出
機構應用12-5 活用區間制動塊可以設計出,單一動作產出複數作業的單元機構
第13章 運用「彈簧聯動」的機構
機構應用13-1 善用彈簧產生的雙動作就可以操控作動時間
機構應用13-2 撿取與移動是使用彈簧聯動器的雙動作
機構應用13-3 使用區間塊與彈簧就能用1 個氣壓缸來驅動撿取與放置單元裝置
機構應用13-4 使用鞋跟彈簧聯動器與肘節的撿取與移動單元裝置
第14章 運用「摩擦力」的機構
機構應用14-1 使用輕拂滑走單元裝置來建構雙動作 168
機構應用14-2 使用輕拂滑走單元裝置,就可以應用曲柄的中間動作
機構應用14-3 使用輕拂滑走單元裝置和凸輪,就可以用單個臂桿來驅動P&P 裝置
機構應用14-4 使用摩擦和區間制動塊,讓單一氣壓缸來傳送工件
機構應用14-5 使用摩擦和曲間制動塊來建構撿取與放置單元裝置
第15章 機巧裝置的設計
機構應用15-1 機巧裝置是以最末端的運動作為導引來著手設計
機構應用15-2 設計XYZ 軸能夠獨自驅動的手臂單元裝置
後語
索引
出版序
前言
目的別「機巧裝置」機構一覽
第1章 機巧裝置和機構的設計思考
機構應用1-1 輸出2 倍力量,變換的速度就會減半
機構應用1-2 使用槓桿的重點就在支點、施力點、抗力點間的距離
機構應用1-3 只要記住改變轉速、方向、傳達動力這3 種功能的機構
就可製作機巧裝置
機構應用1-4 將驅動機構的動作改成手動就能建構出「簡易機巧裝置」
機構應用1-5 組合二種驅動機構以建構出兼具二者特性的「機巧裝置」
機構應用1-6 反轉運動的方向就能建構出好操作的「機巧裝置」
機構應用1-7 將基本要素加以組合,就能完成可控...
購物須知
退換貨說明:
會員均享有10天的商品猶豫期(含例假日)。若您欲辦理退換貨,請於取得該商品10日內寄回。
辦理退換貨時,請保持商品全新狀態與完整包裝(商品本身、贈品、贈票、附件、內外包裝、保證書、隨貨文件等)一併寄回。若退回商品無法回復原狀者,可能影響退換貨權利之行使或須負擔部分費用。
訂購本商品前請務必詳閱退換貨原則。